
MapFix¶

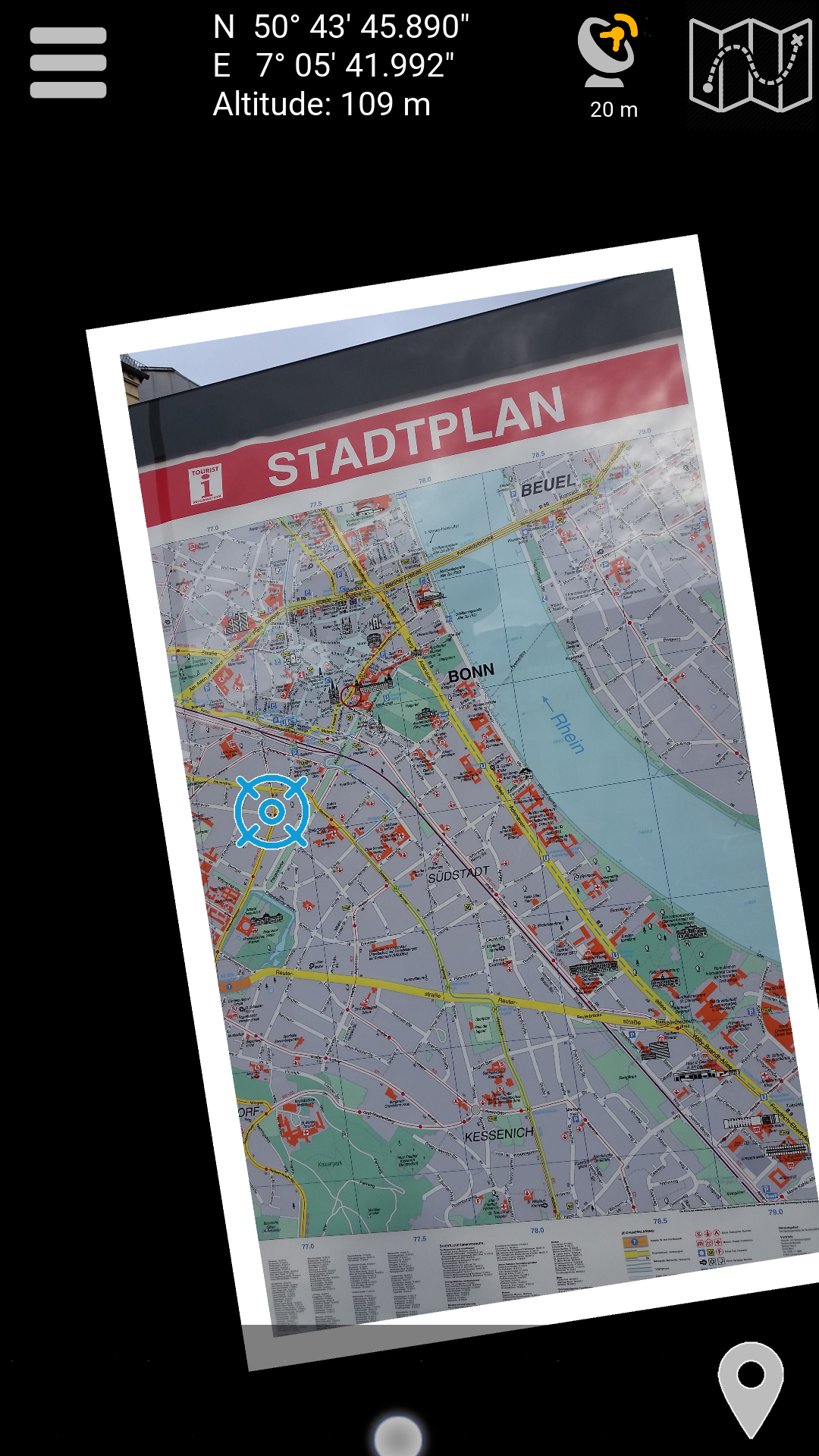
MapFix lets you take photographs of maps and place markers on the image, whenever you know where you are. These markers are used to calibrate the image, so your current location based on your mobile phone’s GPS device is dispayed in the image.
Add markers by double tap. A minimum of two markers is required. The more you add, the better the calibration will be.
|
|
|
Features¶
- Corrects for orientation, scale and perspective
- Many different map projections
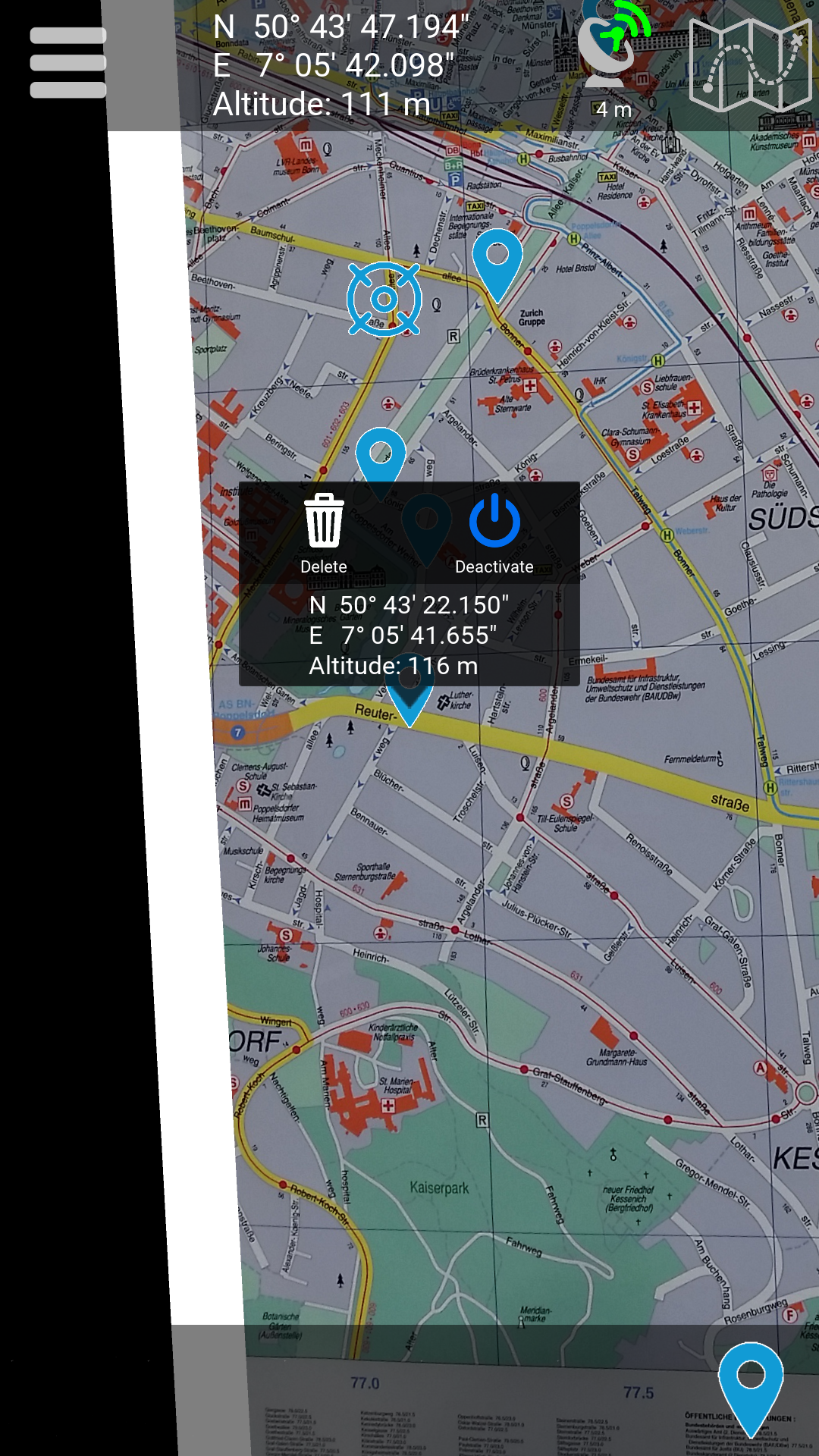
- Modify/Add/Delete calibration markers
- Recalibrate manually
- Lock a calibrated map
Experimental¶
MapFix is in experimantal state and is currently available in the Play Store for registered alpha testers. If you are interested, send me your google username and I will add you to the list of alpha testers!
Contributing¶
Contributions in the form of issues or PRs are more than welcome!
Requirements¶
To run MapFix on Windows, OSX or Linux, you need the following python packages: kivy, click, piexif, pillow, unidecode, exifread, numpy, pyproj and plyer. These will automatically be installed when you setup MapFix.
Depending on the features that you want to use, you do require additional libs though.
- pytest - implement readable tests without boilerplate-code
- pytest-cov - generate an
htmlcoverage report - Sphinx - generate a readable
htmldocumentation - Buildozer - deploy your app to an Android mobile device
Installation¶
Clone the repository:
$ git clone https://github.com/joergbrech/mapfix.git
$ cd mapfix
Create a new virtual environment. Given that you are using virtualenvwrapper:
$ mkvirtualenv -a $(pwd) --system-site-packages mapfix
Note
If you prefer to set up a fresh env, feel free to omit the according option. Chances are that you want to use your systems Kivy including all its dependencies such as Cython.
Install the app package in “editable” mode:
$ python setup.py develop
Usage¶
Launch the app via:
$ mapfix
Run the pytest test suite:
$ make test
Generate an html coverage report:
$ make coverage
Generate Sphinx html documentation:
$ make docs
Build an android apk with Buildozer:
$ make apk-debug
$ make apk-release
Deploy the app to your android device with Buildozer:
$ make deploy
License¶
Distributed under the terms of the MIT license, MapFix is free and open source software
Issues¶
If you encounter any problems, please file an issue along with a detailed description.
This Kivy app was generated with Cookiecutter along with @hackebrot’s Cookiedozer template.